Vleermuisrobot
Vleermuizen zijn populair bij elektronici vanwege hun echolocatie doormiddel van ultrageluid. Daarnaast trekt deze nachtelijke chiroptera ook de aandacht door zijn behendige vliegbewegingen. Deze bijzondere luchtacrobatiek van de vleermuis dient als een studie-en onderzoeksmodel dat flinke technologische uitdagingen oplevert voor het ontwerp en de besturing van vliegende robots.
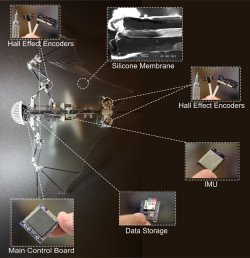
Hier ziet u zo’n autonome robot met de naam Bat Bot (B2). Deze ongeveer 93 gram wegende robot probeert (nog) niet de complexiteit van zijn biologische voorbeeld te evenaren, maar wel zijn beweeglijkheid. De flexibiliteit van vleermuisvleugels is veel groter dan die van de vleugels van de vogels en insecten die tot nu toe werden bestudeerd. Het ultradunne (56 µ) en zeer elastische siliconenmembraan van de vleermuisrobot vormt een continu flexibel oppervlak. Om de mechanische restricties, met name wat gewicht betreft, te verminderen wordt deze bestuurd door een beperkt aantal actuators die de dominante vrijheidsgraden (DOF) van de vlucht van de echte vleermuis reproduceren. Deze vereenvoudiging maakt een robotvlucht mogelijk die weliswaar nog erg kort duurt, maar al een veelbelovende beweeglijkheid laat zien!
{kind=link}