
Van rietje tot robot
op
Soft robots zijn robots die wat de constructie of de gebruikte materialen betreft biologisch geïnspireerd zijn. De eerste generaties soft robots waren onbeholpen apparaten die min of meer konden lopen door strategisch aangebrachte luchtkussens op te blazen en leeg te laten lopen. Nieuwere modellen bewegen zich echter al veel soepeler. De ontwikkelaars van deze arthrobots, George Whitesides en Alex Nemiroski, lieten zich inspireren door insecten en spinnen. Deze kunnen zich snel voortbewegen, overal op klimmen en kunnen in het algemeen dingen doen waar grote ‘harde’ robots niet toe in staat zijn.
Rietje
De vraag rees hoe zoiets nagebouwd kan worden; het antwoord op die vraag had de vorm van een doodgewoon rietje, zoals we allemaal wel eens gebruiken om limonade te drinken. Deze kunststof rietjes hebben een uitstekende gewicht/sterkte-verhouding en maakten het mogelijk semi-soft robots te ontwikkelen.
Als eerste werd een inkeping in een rietje gemaakt zodat ze konden buigen. Vervolgens werd een kleine ballon in het rietje geschoven; door die op te blazen kon het rietje (de ‘poot’) gestrekt worden. Een elastiekje zorgt ervoor dat de poot zich weer buigt als het ballonnetje leegloopt.
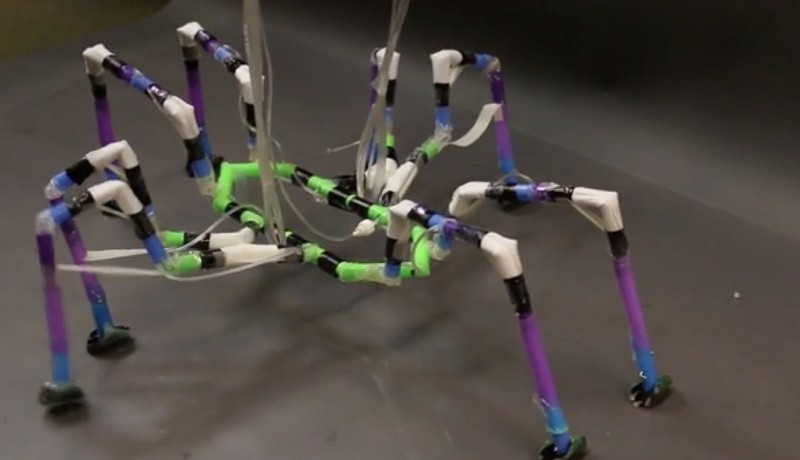
Als eerste werd op deze manier een eenbenige robot gebouwd die al kon rondkruipen, gevolgd door twee-, drie en meerbenige exemplaren. De eerste exemplaren werden nog geheel met de hand bediend (met spuitjes als pneumatisch systeem); voor de zesbenige uitvoering is echter een microcontrollerbesturing op basis van de Arduino ontworpen, gebruikmakend van ventielen en een centrale compressor.
Hoewel robots op basis van rietjes geen direct praktisch nut hebben, kunnen de toegepaste technieken en alledaagse materialen richtingbepalend zijn voor toekomstige innovaties.
(Video: Joe Sherman / Whiteside Group).
Discussie (0 opmerking(en))