

AI voor beginners (1)
op
Walter Trojan (Duitsland)
Kunstmatige intelligentie is op veel gebieden in opmars en vindt zijn weg naar veel apparaten en toepassingen. Voor 2020 wordt voorspeld dat de wereldwijde verkoop van industriële applicaties op het gebied van AI $ 4,8 miljard zal bedragen, en in 2025 zal dat naar verwachting meer dan $ 30 miljard zijn. Wie al kennis heeft van dit vakgebied, heeft goede kansen op de arbeidsmarkt, omdat er dringend behoefte is aan AI-specialisten. Het kost wel wat moeite om vertrouwd te raken met dit onderwerp, maar het opent een heel nieuwe wereld van mogelijke toepassingen. En, last but not least, het is ook heel leuk om er kennis mee te maken.
Onder kunstmatige intelligentie verstaan we onder andere het imiteren van intelligent gedrag. Een deelgebied daarvan is machinaal leren, waarbij een applicatie niet meer in alle details wordt uitgedacht door de ontwikkelaar, maar een universeel toepasbaar programma-raamwerk in de vorm van een neuraal netwerk (NN) zichzelf de benodigde functies aanleert met behulp van een groot aantal voorbeelden. Een subcategorie hiervan is Deep Learning, waarbij complexe en geoptimaliseerde programmastructuren worden gebruikt om de geleverde resultaten verder te verbeteren. Meer details over de hier genoemde technische termen vindt u in deze en de volgende delen van deze kleine serie artikelen.
AI is trouwens geen gloednieuw onderwerp, het bestaat al sinds de jaren vijftig van de vorige eeuw. De doorbraak kwam pas enkele jaren geleden, toen de rekenkracht van de processoren aanzienlijk werd vergroot. Grafische kaarten met honderden parallel werkende rekeneenheden en zeer gespecialiseerde AI-chips maken het nu mogelijk om AI-oplossingen te trainen en toe te passen. Dit maakte de weg vrij voor spraakherkenning, wat in veel persoonlijke assistenten wordt gebruikt, en voor beeldherkenning van allerlei soorten objecten. Van AI wordt ook verwacht dat het een belangrijke rol zal spelen bij het autonoom rijden. Op sommige gebieden is AI al superieur aan de mens, het verslaat de wereldkampioenen in schaken en go en kan in de gezondheidszorg tumoren betrouwbaarder detecteren dan ervaren medische specialisten. Maar er is geen reden voor ongerustheid: deze superioriteit geldt alleen bij getrainde speciale vaardigheden; ook in de toekomst zal het de mens zijn die de leiding heeft over het trainen van de computer.
Goedkope instap
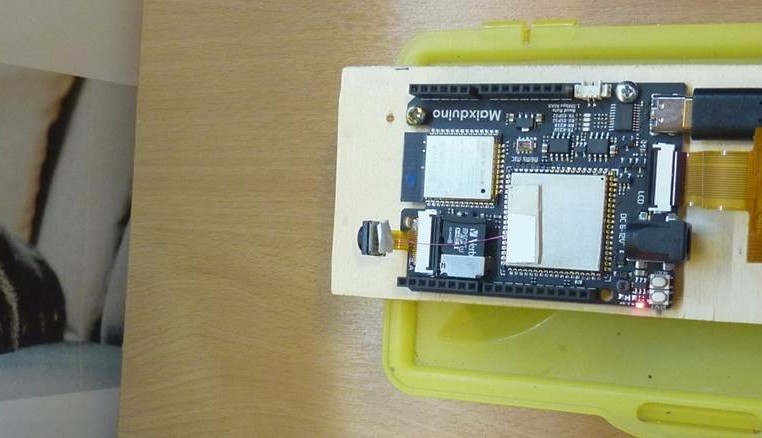
Een goede en goedkope kennismaking met deze wereld is de Maixduino. Hij kost slechts ongeveer € 30 in de uitvoering met een camera en een klein LC-display (de kit bestaande uit board, camera en display is ook verkrijgbaar als MAix BiT-kit bij Elektor, zie kader). Het board heeft de vorm van een Arduino Uno, waar de naam van is afgeleid, maar is veel rijker uitgerust. Het wordt vervaardigd door het Chinese bedrijf Sipeed. Alternatieven voor de Maixduino zijn bijvoorbeeld de Jetson Nano van Nvidia, de ROCK PI N10 Model A, de Intel Neural Compute Stick 2 en enkele andere, maar die vallen in de honderd-euro-prijsklasse.
In het eerste deel van dit artikel gaat u kennismaken met de rijke hardware van de Maixduino en het programmeren ervan met behulp van de Arduino-IDE. Naast enkele typische Arduino-applicaties kijken we ook naar het gebruik van de camera en het display. Als hoogtepunt demonstreren we tenslotte hoe het board gebruikt kan worden voor objectherkenning.
Het tweede deel gaat dan dieper in op het onderwerp AI, beschrijft de structuur van neurale netwerken, behandelt de installatie van MicroPython en de bijbehorende IDE en laat zien hoe gezichtsherkenning werkt. Daarnaast laat het zien hoe u uw eigen AI-toepassingen kunt programmeren en hoe u kunt communiceren met het internet.
Een gedetailleerd overzicht van de super-Arduino
De specificaties van de Maixduino laten het hart van hardware-liefhebbers sneller kloppen. De afmetingen en vorm van het board zijn grotendeels gelijk aan die van de Arduino Uno, maar het valt meteen op dat er veel meer componenten en veel extra aansluitingen op zitten. In het midden zitten twee grote chips. Eén daarvan is de AI-processor Sipeed M1 met de Kendryte K210, waarop we later ingaan, de andere is een ESP32 voor de communicatie via WLAN en Bluetooth en voor het inlezen van analoge signalen. De ESP32 biedt met zijn twee op 240 MHz geklokte processoren al een flinke rekencapaciteit en ontlast de hoofdprocessoren van vervelend communicatiewerk. Hij is al meerdere malen in dit tijdschrift gepresenteerd, dus daar gaan we hier niet verder op in.
De connectoren komen qua aantal pennen en rangschikking overeen met de Arduino en zelfs de pinbezetting is grotendeels gelijk. Maar let op: de in-/uitgangen zijn bedoeld voor 3,3 V of zelfs slechts 1,8 V, 5 V zou absoluut dodelijk zijn!
Meer details zijn te zien in figuur 1. Voor het aansluiten van de camera en het LC-display zijn 24-pens connectoren beschikbaar. Een sleuf voor een microSD-kaart geeft de Maixduino toegang tot grote hoeveelheden gegevens. De USB-aansluiting is een moderne type-C-uitvoering en wordt gebruikt voor het programmeren en monitoren. Voor het verwerken van audiodata zijn een digitale microfoon, een audioversterker met een uitgangsvermogen van 3 W en een upstream D/A-converter beschikbaar. Met deze uitgebreide uitrusting kunnen tal van projecten worden gerealiseerd zonder extra hardware.

Een blik op de pinbezetting (figuur 2) toont de grote overeenkomst met de Arduino. Het board kan worden gevoed via de DC-bus, via de pen VIN met een DC-spanning van 6...12 V of met 5 V via USB. De GPIO’s 32...36 en 39 van de ESP32 zijn naar buiten gevoerd en kunnen als alternatief dienen voor de analoge ingangen A0...A5. Aan de andere kant zitten de in-/uitgangen van de K210 module.

Ze kunnen worden aangestuurd met de gebruikelijke Arduino-commando’s, waarbij het Arduino-pinnummer overeenkomt met het nummer van de K210-ingang/uitgang:
#define LED 12 // K210-IO12, Maixduino-Pin 10
pinMode(LED, OUTPUT); // Port als Ausgang
digitalWrite(LED, HIGH); // Port auf High-Potential (3,3 V)
De RST-pen is van het type 1,8 V en mag beslist niet op een hogere spanning worden aangesloten. De uitgangen IO36...IO47 zijn ook ontworpen voor dit lage spanningsniveau, maar zijn niet naar buiten gevoerd naar aansluitpennen; ze worden intern gebruikt, bijvoorbeeld voor het aansturen van het LCD. De poorten voor RX/TX en I2C zijn al voorzien van geschikte pullup-weerstanden op de print.
Helaas geeft het datasheet van de K210 niet aan wat de maximale uitgangsstroom van de uitgangen is. Het zou voldoende moeten zijn om een LED aan te sturen met ongeveer 10 mA, maar voor grotere stromen is een driver-IC aan te bevelen.
Het hart van de machine: de Kendryte K210
Het SoC (System-on-a-Chip) K210 van het Chinese bedrijf Kendryte is het hart van de Maixduino. Het wordt gefabriceerd in een energiebesparende technologie met een pitch van 28 nm en is sinds september 2018 op de markt. Voor het verwerken van de ‘normale’ werklast zijn twee 64bit-processoren beschikbaar, die worden geklokt op 400 MHz, waarbij overklokken tot 800 MHz mogelijk is. Hun binnenwerk is gebaseerd op de open RISC-V standaard, waardoor de fabrikant de licentiekosten voor het bedrijf ARM bespaart, wat iets bijdraagt aan de lage verkoopprijs. Beide processoren zijn uitgerust met een FPU (Floating Point Unit) ter ondersteuning van drijvende-komma-bewerkingen (enkele en dubbele precisie). Figuur 3 toont de andere ingewanden van deze chip in detail.
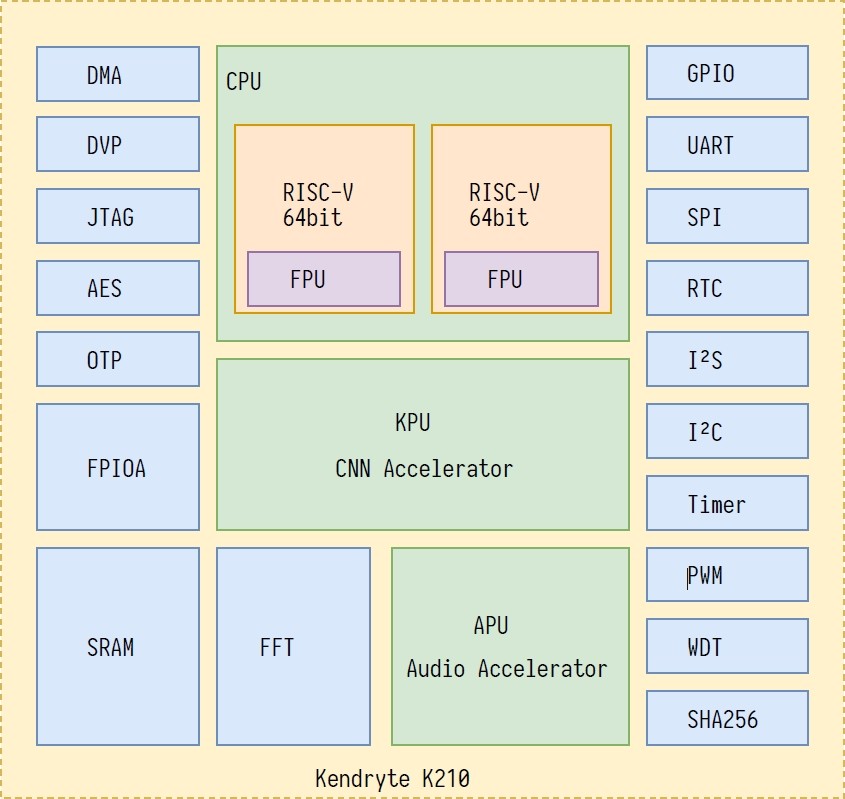
Het bijzondere aan de K210 is de KPU (Knowledge Processing Unit) voor het afbeelden en berekenen van neurale netwerken. Deze heeft een voor dit prijssegment fenomenale rekenkracht van 0,46 TOps, oftewel 460 miljard instructies per seconde. Dit zou kunnen worden verdubbeld door overklokken (waardoor bijvoorbeeld herkenning van 60 objecten per seconde mogelijk is). Deze hoge verwerkingssnelheid wordt bereikt door 64 rekeneenheden die parallel werken aan een woordbreedte van 576 bits. Het energieverbruik is zeer laag in vergelijking met andere AI-systemen: 0,3 W. Voor de Jetson Nano adviseert Nvidia bijvoorbeeld een voeding van 5 V/4 A = 20 W voor een vergelijkbaar rekenvermogen van 0,4 TOps.
De KPU kan geavanceerde architecturen van neurale netwerken afbeelden, bijvoorbeeld convolutionele netwerken, die worden gekenmerkt door een bijzonder efficiënt oplossingsproces en door speciale filtermethoden bijzonder geschikt zijn voor beeldbewerking. Meer hierover in het tweede artikel. Het snelle hoofdgeheugen dat in het SoC is geïntegreerd, heeft een capaciteit van 8 MB, verdeeld over de processoren en de KPU in een verhouding van 6 op 2 MB en maakt het mogelijk om maximaal 5,9 MB te gebruiken voor neurale netwerken. Daarmee kunnen we middelgrote netwerken implementeren.
Maar de K210 heeft nog meer hardware-pareltjes te bieden. Ten eerste is er de audioprocessor (APU) voor het analyseren van audiodata, die met name nuttig is voor het voorbewerken van spraakanalyse. Deze heeft 8 kanalen (of 4 stereokanalen). De ingangssignalen kunnen worden opgenomen met een bemonsteringsfrequentie tot 192 kHz en het frequentiespectrum wordt ontleed door een FFT-unit (Fast Fourier Transformation).
Ook vermeldenswaard zijn de versnellers voor encryptie, de AES Accelerator en de SHA256 Accelerator.
Natuurlijk is de gebruikelijke periferie zoals UART, I2C, SPI, I2S, timers, RTC en PWM ook aan boord.
Sipeed heeft het Maixduino-board ook uitgerust met 16 MB flashgeheugen, een geschikte voeding, microfoon en 3 W versterker en de grootse ESP32. Hardware-hart, wat wil je nog meer? Zie de weblinks [1][2][3] voor meer informatie over ingebruikname, schema’s en andere details.
Software-ontwikkeling
Niet alleen het hardware-ontwerp maar ook de software-ontwikkeling is gebaseerd op de originele Arduino, daarbij wordt gebruik gemaakt van de Arduino-IDE. Om deze ontwikkelomgeving uit te breiden wordt de Maixduino-kern geïntegreerd in de IDE, net als bij de ESP8266 of de ESP32. Hiervoor wordt in het menu onder File -> Preferences een aanvullende URL voor de boardmanager ingevoerd. Klik op de knop rechts van de invoerregel om een klein extra venster te openen dat de invoer vergemakkelijkt (figuur 4). Als u alleen de Maixduino wilt programmeren, dan is alleen de “sipeed”-regel nodig, omdat de ingebouwde ESP32 daarmee ook wordt geprogrammeerd.

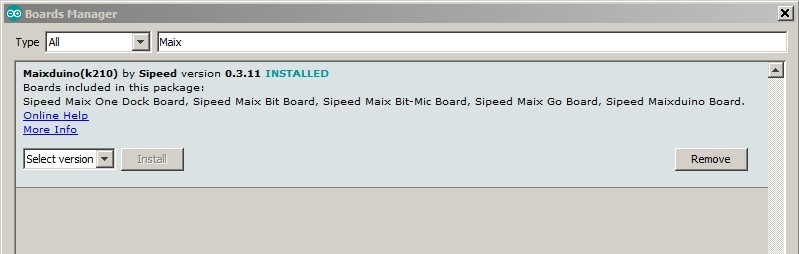
Om de Maixduino-core te installeren, wordt de boardmanager opgeroepen via de menukeuze Tools -> Board. Na het invoeren van de zoekterm “Maix” (figuur 5) kan de installatie worden uitgevoerd.
En dan kunnen we meteen beginnen met programmeren. We slaan het gebruikelijke “hallo wereld” hier maar over en gaan meteen beginnen met het uitproberen van de camera en het display. Sluit de Maixduino aan via USB en stel de parameters voor het board in via het menu-item Tools:
Board: Sipeed Maixduino
CPU Clock Frequency: 400 MHz
Burn Tool Firmware: open-ec
Burn Baud Rate: 1.5 Mbps
Tool Install Location: Standard
Port: <Gebruikte COM-poort>
Programmer: k-flash
Een demoprogramma voor het vastleggen en weergeven van beelden op het LCD is al beschikbaar in de IDE; het wordt aangeroepen via File ->Examples -> Sipeed_OV2640 -> selfie. Na het uploaden wordt hett programma gestart (druk, indien nodig, op de resetknop). De code is weergegeven in figuur 6.

Aan het begin van het programma zien we de definitie van vereiste Sipeed-bibliotheken voor camera en LCD, die via de SPI-bus op het board zijn aangesloten. De gekozen resolutie komt overeen met de QVGA-standaard en bedraagt 320x240 pixels (kleur, RGB565). De setup-routine initialiseert de beide apparaten. En in de eindeloze lus worden de opgenomen beelden direct op het LCD-scherm weergegeven. Een kind kan de was doen.
Het beeld is niet erg contrastrijk, maar het is wel scherp en de weergave is vloeiend. In figuur 7 zien we het resultaat.
Het blijkt dat de Maixduino net zo toegankelijk is als een Uno, maar hij biedt veel meer mogelijkheden en we kunnen direct beginnen met meer veeleisende toepassingen.
Een eerste AI-model
Eigenlijk willen we pas in het tweede deel meer in detail ingaan op kunstmatige intelligentie en Deep Learning, maar we demonstreren hier toch alvast een eerste toepassing. Het is de demo Mobilenet, die niets te maken heeft met mobiele telefonie, maar wel 1000 objecten uit het dagelijks leven kan herkennen en classificeren. Hiervoor worden aan een neuraal netwerk, een softwarestructuur bestaande uit in lagen gerangschikte knooppunten, in een complexe trainingsprocedure duizenden beelden van de objecten gepresenteerd.
Aangezien het bestand met de foto’s voor de training een omvang heeft van ongeveer 200 GB en het leerproces zeer complex is, zou het nauwelijks haalbaar zijn op de Maixduino. Maar er is de mogelijkheid om een reeds getraind model te gebruiken en direct te beginnen met het herkennen van objecten. En dat is precies wat we hier willen laten zien.
De bijbehorende software is beschikbaar onder link [4] en bevat de volgende componenten:
- mobilenet_v1.ino: C++ hoofdprogramma voor het uitvoeren van de demo
- MBNet_1000.h: header-bestand voor demoroutines
- MBNet_1000.cpp: C++ routines voor het verwerven, herkennen en weergeven van objecten
- names.h: header-bestand voor de objectnamen
- names.cpp: C++ routine met de namen van de herkenbare objecten
Download deze bestanden en plaats ze allemaal in één map. Het vooraf getrainde AI-model mobilenet_0x300000.kfpkg is te vinden onder [5], gecomprimeerd is het maar een paar MB groot. Na het uitpakken met 7zip vindt u een map mobilenet_0x300000 die twee bestanden bevat, één daarvan is het bestand “m” met het model. Kopieer dit bestand naar de hoofdmap (de bovenste map) van een microSD-kaart en plaats de kaart in de sleuf van de Maixduino.
Een blik op de programmacode in figuur 8 leert ons dat zelfs zeer complexe toepassingen met weinig moeite kunnen worden geprogrammeerd. Dat is natuurlijk te danken aan de grote prestaties van de bibliotheken. Op het gebied van AI zijn veel verschillende, zeer efficiënte libraries beschikbaar. Het eerste deel van het programma wordt gebruikt om de camera, het LC-display, de KPU en de demoapplicatie te koppelen en de bijbehorende parameters in te stellen. Daarbij wordt de camera ingesteld op het formaat van de trainingsfoto’s, namelijk 224x224 pixels. Tenslotte krijgt het object mbnet de resources KPU, camera en LCD toegewezen.

Dan wordt in de setup-routine de demonstratie gestart en in de lus worden de objecten die voor de camera verschijnen geclassificeerd en weergegeven op het LCD. Dit is een heel gemakkelijkere manier om een objectdetectie te programmeren.
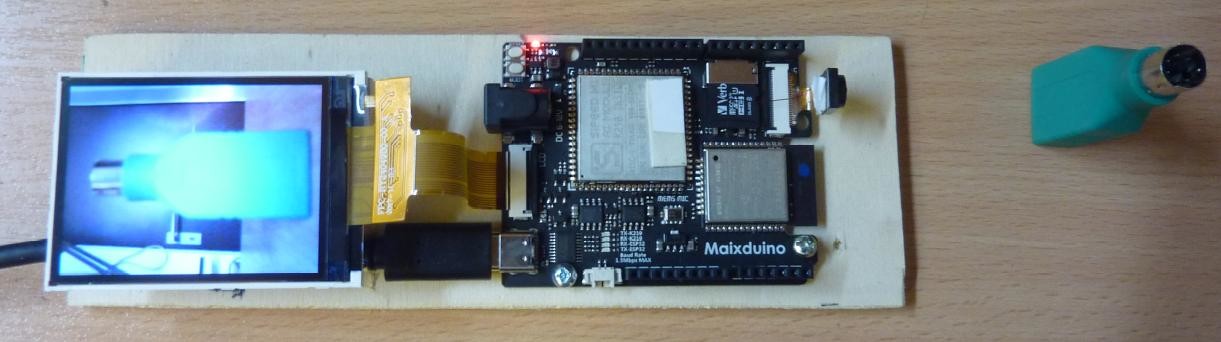
Als testobject toonden we de Maixduino een foto van een kat (figuur 9), die hij onmiddellijk identificeerde als een cyperse kat (figuur 10). Het programma classificeert ca. 5 frames per seconde en zou dus zelfs bij bewegende beelden bruikbare resultaten kunnen produceren. Maar de belichting moet goed zijn en de achtergrond mag niet te verwarrend zijn.
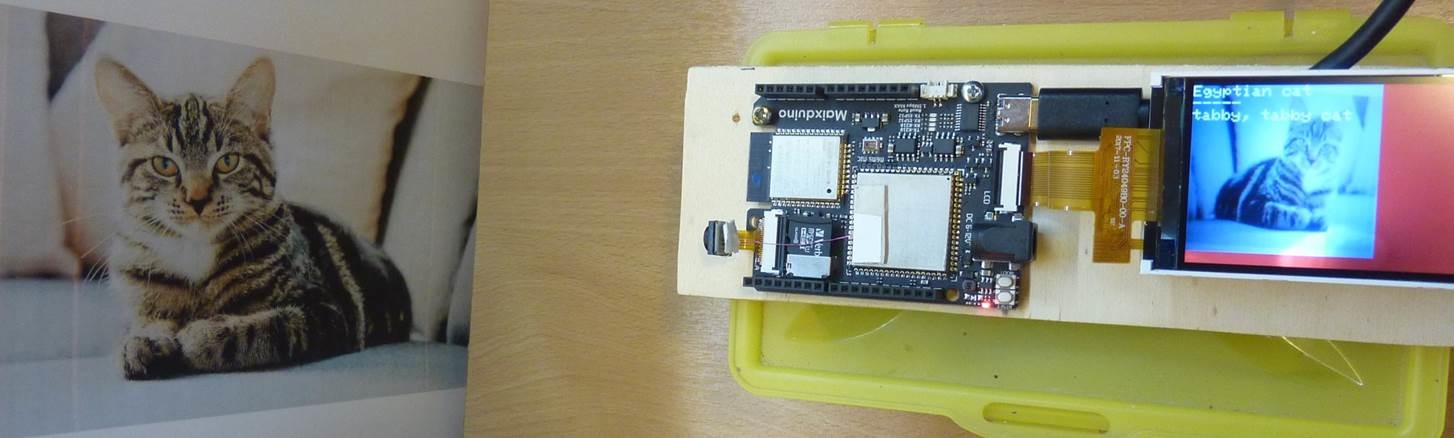
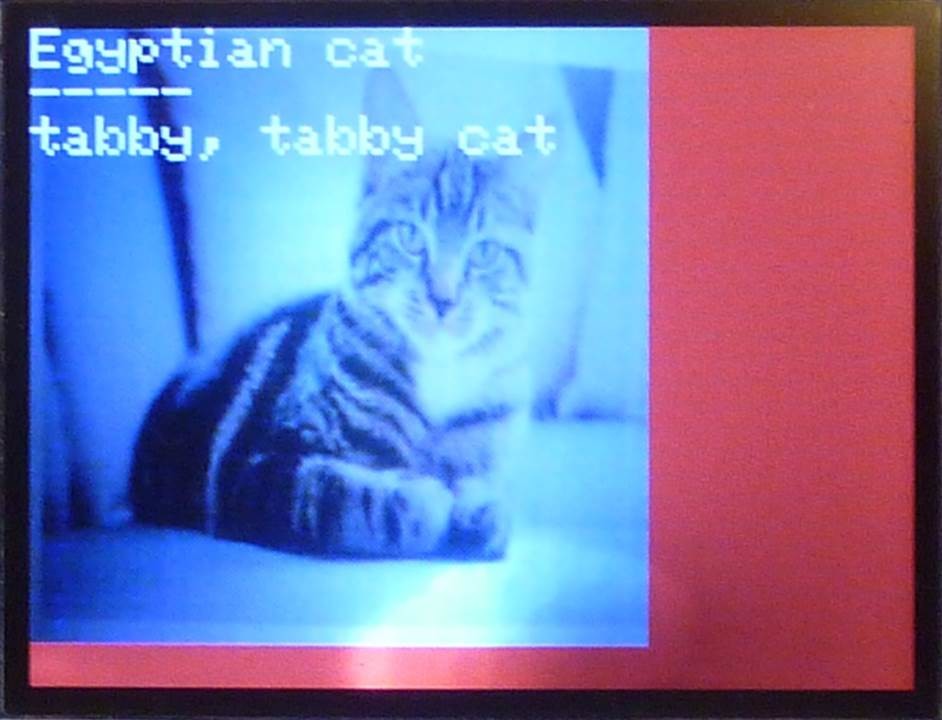
Figuur 10 laat zien dat het beeld nu een blauw-witte kleur heeft om een hogere detectiesnelheid te bereiken. Dit is een vaak toegepaste methode: in plaats van te werken met een beeld in drie kleuren, wordt er met één kleur gewerkt om het aantal pixels en dus de nodige rekeninspanning te verminderen. Het gebruik van een vooraf getraind NN, d.w.z. training en classificatie op verschillende platforms, is in deze sector vrij gebruikelijk. Veel gebruikers gebruiken de grote rekenkracht van AWS, Microsoft Azure of Google Cloud voor het trainen en draaien het NN op een platform met een kleinere rekencapaciteit. De halfgeleiderindustrie speelt hier al op in. Zo heeft Intel onlangs de Neural Network Processors Nervana™ NNP-T en NNP-I aangekondigd. De T-versie heeft een groot rekenvermogen voor het trainen en de I-versie is alleen bedoel om het getrainde netwerk op te gebruiken.
Wordt vervolgd
Met deze demonstratie van een AI-applicatie konden we het onderwerp alleen maar introduceren, maar hopelijk is uw interesse in lerende machines hiermee gewekt.
In het volgende artikel wordt dieper ingegaan op de structuur en werking van een neuraal netwerk. Dan komt er een nieuwe ontwikkelomgeving, want we willen u vertrouwd maken met Linux en de programmeertaal Python. Daar zijn de krachtigste bibliotheken en frameworks voor beschikbaar. Die maken bijvoorbeeld het ontwerp van een neuraal netwerk bijna net zo eenvoudig als het in elkaar passen van Legostenen. Als extra AI-toepassing gaan we dan kijken naar gezichtsherkenning en het ontwikkelen van eigen NN’s. Wie niet kan wachten, zou het boek “Neuronale Netze selbst programmieren” van Tariq Rashid moeten lezen.
(200023-04)
----------------------------------------------------------------------------------------------------------------------------------------------------
Wilt u meer van die fantastische Elektor-artikelen?
--> Neem vandaag nog een abonnement op Elektor - u mist nooit meer een artikel, project of handleiding!
----------------------------------------------------------------------------------------------------------------------------------------------------
Discussie (5 opmerking(en))
Adrie Kooijman 4 jaar geleden
cannot declare variable 'camera' to be of abstract type 'Sipeed_OV2640'
Volgens https://github.com/sipeed/Maixduino/issues/59 zit er een foutje in de sourcecode voor de camera (spelfout in setRotaion(... -> setRotation(... ) , na aanpassing compileert en laadt de code wel, maar het programma komt niet verder dan 'snap fail'.
Het tweede voorbeeld (mobilenet_v1) lijkt ook te lijden onder een niet werkende camera. Het lukt om een en ander te laden, het laden van de database op de SD kaart lukt ook (vergeet niet de naam te wijzigen naar m -> zonder extensie) maar er wordt niets herkend (detect object fail).
Dezelfde issues worden gemeld op https://www.elektormagazine.com/articles/artificial-intelligence-for-beginners-1#
Ik heb met behulp van kflash de python interpreter (weer) op het board gezet en daarmee werken de camera en het display zonder problemen. Wachten op updates dus maar?
NB: python geeft na sensor.reser() aan dat er een gc3028 module gevonden is, op een van de forums werd aangegeven dat sommige modules wel, en anderen niet werken (ik weet niet meer welke pagina)
Edgar Marx 4 jaar geleden
int Sipeed_OV2640::sensor_snapshot( ){ g_dvp_finish_flag = 0; uint32_t start = millis(); while (g_dvp_finish_flag == 0) { usleep(50); if(millis() - start > 300) return -1; } return reverse_u32pixel((uint32_t*)_dataBuffer, _width*_height/2); }
returns minus one, which is why image pointer *img of selfie.ino is NULL.As the internet shows, i am not the only one with this problem. How did the author manage that?
Ron Baeten 4 jaar geleden
sispeed delivers something elese and there bappears no driver for the camera.
bit disapointed about that. It works wel with a real ov2640 camera but i expected more when i buy such a thing at Elektor.
Jaap Bruijn 4 jaar geleden
I use the Helloworld.py demo (MaixPy) and get an error "can't find sensor". After turning the camera cable 180 degrees an gc 3028 camera was found and the demo works fine. See terminal test:
MicroPython v0.5.0 on 2019-11-29; Sipeed_M1 with kendryte-k210
Type "help()" for more information.
>>> import sensor
>>> sensor.reset()
init i2c2
[MAIXPY]: find gc3028
>>>
Ron Baeten 4 jaar geleden
I had some initial problems with the first knowlegde demo but the solution was suprisingly simple i had copied m.kmodel to the sd card.
This made it impossible to load the model. After some browsing i found the sulotion: rename the model file to just m without the extension.
Now everthing works fine.