

Hunter
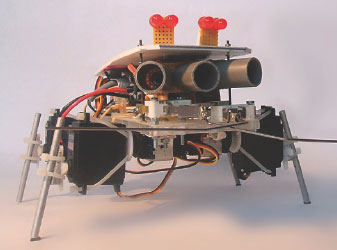
Binnen het scala aan zelfbouwrobots neemt de 4-potige looprobot een speciale plaats in. Lopen op vier poten is en blijft een uitdaging. Het geeft dan ook heel veel voldoening om deze robot te bouwen.
Naast de keuze voor de wijze van voortbewegen moeten we ook keuzes maken met welke sensoren we onze robot uit gaan rusten om de omgeving te verkennen. In dit geval is gekozen voor tastharen/voelsprieten voor de korte afstand om objecten te ontwijken. Daarnaast zal de robot op grotere afstand bewegende warme objecten, zoals mensen en dieren detecteren met behulp van een PIR-sensor (Passive Infra Red ).
Bij het ontwerp van een robot is ook de keuze van de processor van belang. Er moeten voldoende I/O-lijnen beschikbaar zijn en de processor moet
Dit is een MEMBER ONLY artikel. Je hebt een abonnement nodig om dit artikel te kunnen lezen.
- Onbeperkt toegang tot Member Only artikelen
- 3 nieuwe edities van Elektor Magazine (digitaal)
- Meer dan 5000 Gerber-bestanden
- 20% ledenkorting op e-books (op elektor.nl)
- 10% ledenkorting op producten (op elektor.nl)
Beschikbaar vanaf € 6,33 per maand.
Wat is Members Only
Elektor zet zich in om hoogwaardige inhoud op het gebied van elektronica te bieden, waarmee tienduizenden betalende leden worden bediend. In het kader van deze inzet heeft Elektor de initiatief Premium gelanceerd, dat exclusieve online-artikelen voor leden aanbiedt, soms zelfs voordat ze in het magazine verschijnen.
Elke dag kunnen leden toegang krijgen tot diepgaande artikelen die het beste van Elektors premium-inhoud presenteren.
Dit initiatief heeft als doel leden te belonen met een vroegtijdige toegang. Zodra u bent ingelogd, kunt u moeiteloos genieten van deze exclusieve inhoud en deelnemen aan discussies over de voorgestelde projecten.
Terwijl Premium de beschikbare bronnen uitbreidt, zal Elektor blijven zorgen voor een overvloed aan gratis informatie.
Word vandaag nog lid van de Elektor-community om te profiteren van Premium en andere voordelen!
Discussie (0 opmerking(en))