Review: Motor Control - Projects with Arduino & Raspberry Pi Zero W
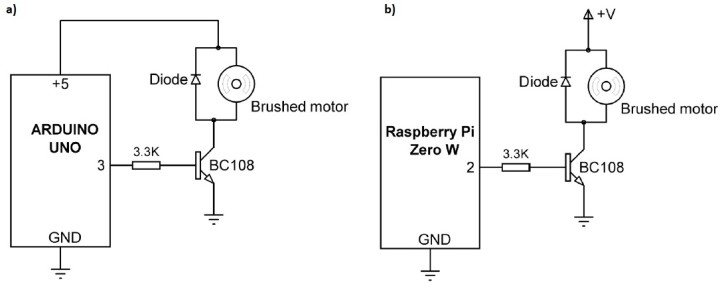
In project 1 zien we een klassieke gelijkstroommotor met koolborstels die kan worden gevoed met 3 tot 6 V. Hij wordt met de microcontroller verbonden via een transistor-driver. De motor wordt voor 10 seconden ingeschakeld en daarna voor 5 seconden uitgeschakeld. Dit gaat door tot het programma wordt gestopt. De vele projecten die daarop volgen zijn wat ingewikkelder, maar Ibrahim neemt steeds de moeite om de technische details zoveel mogelijk te vereenvoudigen. Als het bijvoorbeeld gaat om een pulsbreedtemodulatie-systeem (PWM = Pulse WidthModulation), dan illustreert hij duidelijk de duty-cycle van de PWM-golf en maakt hij gebruik van eenvoudige vergelijkingen om de belangrijkste begrippen uit te leggen.
Schema’s voor project 1 met (a) een Arduino Uno en (b) een Raspberry Pi Zero W.
Na het behandelen van eenvoudige gelijkstroommotorprojecten in Hoofdstuk 2, pakt Ibrahim in Hoofdstuk 3 eenvoudige stappenmotorprojecten aan. In Hoofdstuk 4 komen servomotorprojecten aan de orde, Eén van interessantste ontwerpen is een robot die obstakels vermijdt met een ultrasone sensormodule voor het detecteren van de afstand tussen de robot en de objecten in zijn omgeving. Ibrahim: “Als de afstand tot het object 50 cm of minder is, draait de robot naar links, totdat hij vrije ruimte ziet zonder objecten binnen 50 cm. Daarna gaat hij weer vooruit.” Bekijk de goed geschreven code in Hoofdstuk 2 om zelf zo’n project te ontwikkelen.

Discussie (0 opmerking(en))