
SCAMP-robot hangt aan muren, klimt ertegenop en kan ook nog vliegen
22 maart 2016
op
op
Niet te verwarren met Elektor’s beroemde zelfbouwrobot uit 1970 met de naam SC/MP (spreek uit: ‘scamp’), is het Stanford Climbing and Aerial Maneuvering Platform (SCAMP) een robot die kan vliegen, aan een muur hangen, klimmen, een misstap herstellen en wegvliegen – met gebruik van uitsluitend zijn eigen sensors en rekenkracht.
SCAMP, volgens de IEEE een kruising tussen een land- en een luchtvoertuig, kan op plaatsen komen (en blijven) die zelfs voor tweebenige Transformers en andere superkrachtige Hollywood-robots onbereikbaar zijn.
De meest opmerkelijke eigenschap van SCAMP is zijn vermogen om verticale oppervlakken, zoals muren die na een aardbeving overeind zijn gebleven, te beklimmen en daar veel langer in een stabiele positie te blijven dan een drone kan blijven vliegen. Als hij voelt dat hij gaat vallen vliegt SCAMP weg. De onderzoekers van Stanford noemen hun uitvinding deels specht, deels langpootmug en deels kolibrie. Als toepassingen worden het meten van naschokken en het opzetten van een tijdelijk communicatienetwerk genoemd.
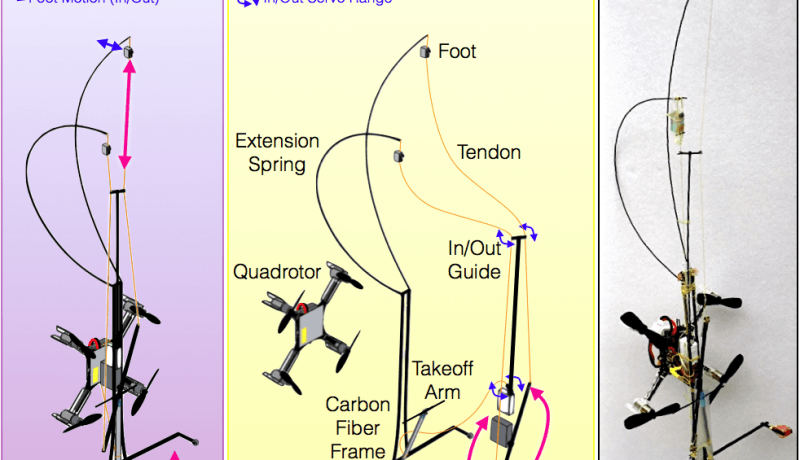
SCAMP vliegt met zijn staart naar voren tegen de muur. Hij detecteert de versnellingspiek bij de botsing en zet zijn rotors op maximum snelheid. De staart fungeert als een hefboom en SCAMP wordt aerodynamisch tegen de muur gedrukt terwijl zijn poten een goede plek zoeken om zich vast te klemmen.
SCAMP, volgens de IEEE een kruising tussen een land- en een luchtvoertuig, kan op plaatsen komen (en blijven) die zelfs voor tweebenige Transformers en andere superkrachtige Hollywood-robots onbereikbaar zijn.
De meest opmerkelijke eigenschap van SCAMP is zijn vermogen om verticale oppervlakken, zoals muren die na een aardbeving overeind zijn gebleven, te beklimmen en daar veel langer in een stabiele positie te blijven dan een drone kan blijven vliegen. Als hij voelt dat hij gaat vallen vliegt SCAMP weg. De onderzoekers van Stanford noemen hun uitvinding deels specht, deels langpootmug en deels kolibrie. Als toepassingen worden het meten van naschokken en het opzetten van een tijdelijk communicatienetwerk genoemd.
SCAMP vliegt met zijn staart naar voren tegen de muur. Hij detecteert de versnellingspiek bij de botsing en zet zijn rotors op maximum snelheid. De staart fungeert als een hefboom en SCAMP wordt aerodynamisch tegen de muur gedrukt terwijl zijn poten een goede plek zoeken om zich vast te klemmen.
Read full article
Hide full article
Discussie (0 opmerking(en))