
Yes We CAN met PiCAN 3: Een CAN Bus HAT voor de Raspberry Pi 4
op
Sinds Bosch in 1986 de controller area network (CAN)-busspecificatie registreerde en Mercedes-Benz deze voor het eerst gebruikte in zijn S-Klasse-model in 1991, is er veel data onder de brug door gestroomd. Ondertussen is CAN een integraal onderdeel geworden van ontwikkeling en ontwerp van auto's. De CAN-bus is robuust en daardoor bruikbaar voor vele andere toepassingsgebieden. Een mobiele CAN-bus unit is handig om communicatie te analyseren, problemen te diagnosticeren en te controleren. De PiCAN HAT die hier wordt besproken, kan deze klus klaren, en hij kan worden aangesloten op de nieuwste versie van de Raspberry Pi. Laten we het eens nader bekijken. Elektrische systemen van voertuigen zijn vijandige omgevingen voor kwetsbare elektronische apparaten. Ik herinner me veel van mijn pogingen om fouten op te sporen, waarbij ik 40 m lange kabels legde om oscilloscopen van stroom te voorzien om apparatuur in een auto uit te testen. Als u geïnteresseerd bent in het puur evalueren van CAN-busgegevens, kan de PiCAN 3 nu een aantrekkelijk en draagbaar diagnostisch alternatief bieden.
Waarom een Raspberry Pi gebruiken?
Wanneer u experimenteert met een communicatiesysteem met bussen zoals I2C, SPI, enz., zullen er problemen optreden, niet als gevolg van een slechte signaalkwaliteit op de fysieke laag, maar bij het organiseren en rangschikken van de verzonden gegevens zelf. Als je bijvoorbeeld verkeerd gevormde pakketten verstuurt of in de war raakt hoe de bytes moeten worden gerangschikt, zou je niet verbaasd moeten zijn als de motor of ander apparaat dat je hoopte te besturen weigert mee te werken. Tools zoals PiCAN 3 in combinatie met een Raspberry Pi staat mobiele metingen toe. Idealiter, een Raspberry Pi 4 met een kleine monitor is alles wat je nodig hebt om een draagbare testopstelling te bouwen. Als u de ontwikkelomgeving van het CAN-systeem integreert in de ARMbian-distributie van het systeem, bent u klaar om aan de gang te gaan.De hardwarefuncties
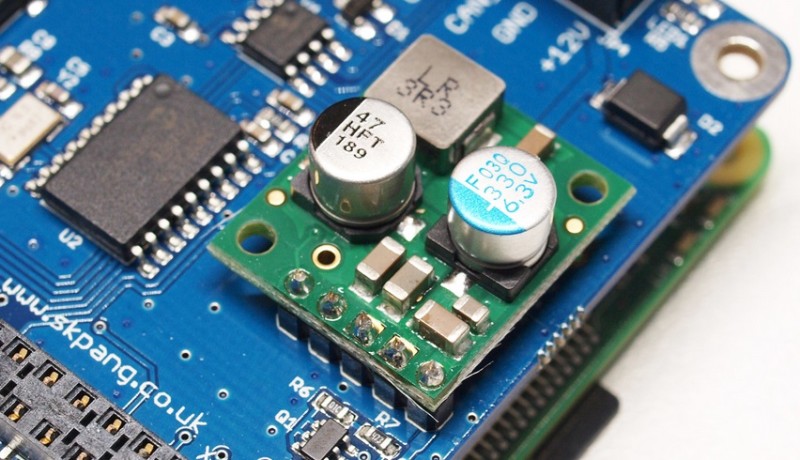
De elektrische omgeving in een auto kan behoorlijk vijandig zijn voor elektronische circuits. De fabrikant SK Pang heeft hier rekening mee gehouden in het ontwerp van het board door een DC/DC converter voeding op te nemen (Figuur 1) met een breed ingangsspanningsbereik van 6 VDC tot 20 VDC die via een vijf-pins header op het board wordt aangesloten. De PiCAN HAT zou beschikbaar moeten zijn zonder de DC/DC converter voeding, maar momenteel is dit niet het geval en is de ingebouwde DC/DC converter standaard.
Dit nieuwste CAN-shield wordt beschreven als het "PiCAN 3 - CAN-Bus Board voor Raspberry Pi 4 met 3 A DC/DC converter & RTC" om het te onderscheiden van zijn voorgangers. Deze nieuwste versie bevat een 3-A DC/DC converter voeding om de energieverslindende Raspberry Pi 4 te laten werken. Het shield kan ook rechtstreeks vanaf de Raspberry Pi worden gebruikt wanneer het wordt gevoed via de USB-C poort. Het schema kan worden bekeken op [1] en laat zien dat in het hele ontwerp standaard IC's worden gebruikt. De gebruikershandleiding is beschikbaar op [2].
De CAN-signaalbusinterface wordt gevormd met de MCP2515, die via SPI en een GPIO-interruptpin met de Raspberry Pi communiceert. De fysieke interface met de bus wordt geleverd via het MCP2562 CAN-bus-transceiver IC. Het PiCAN 3 schakelschema laat zien dat de 3,3 V-voeding die door sommige componenten op het board wordt gebruikt, afkomstig is van een regelaar op de Raspberry Pi, waardoor een extra regelaar wordt bespaard.
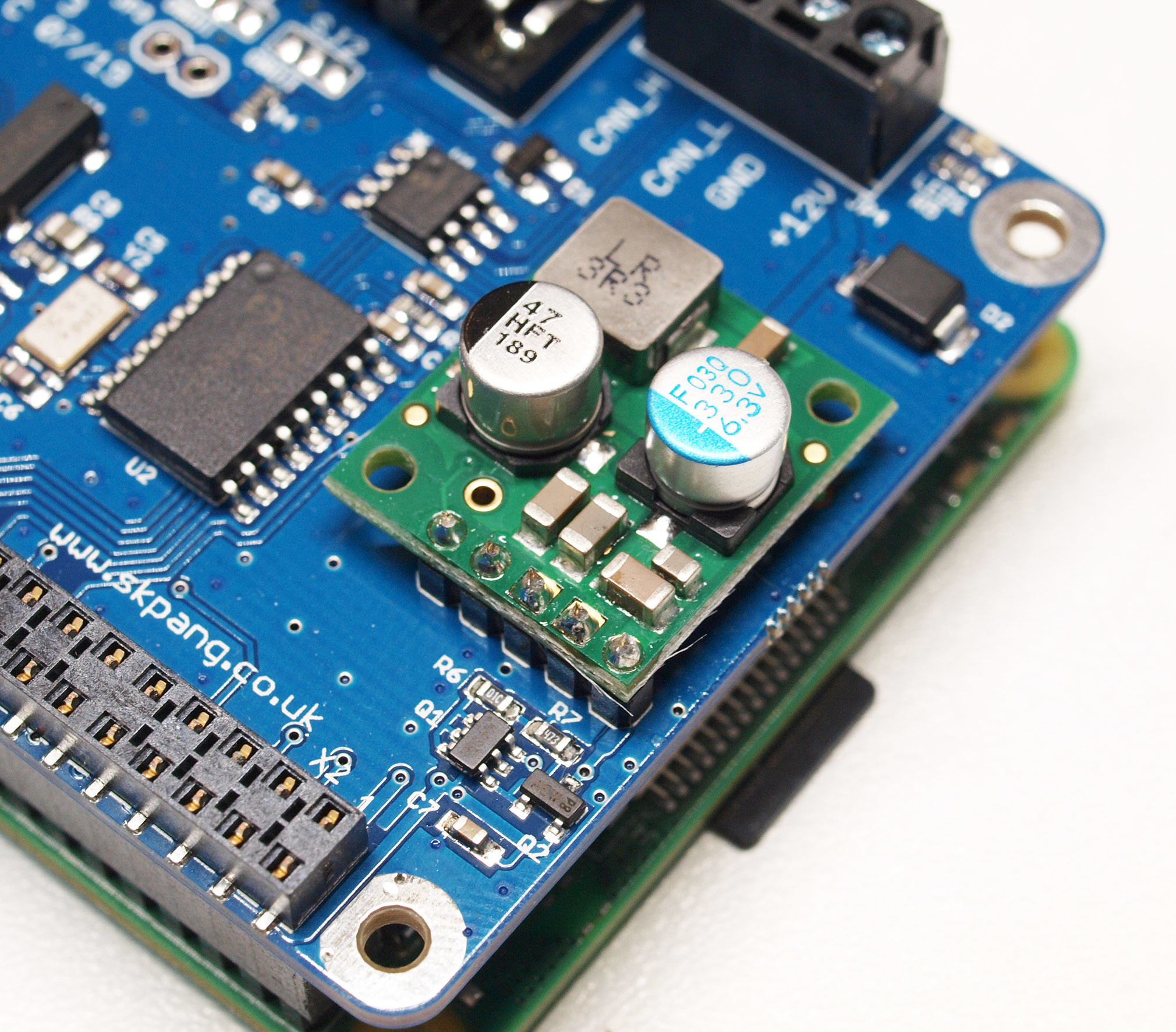
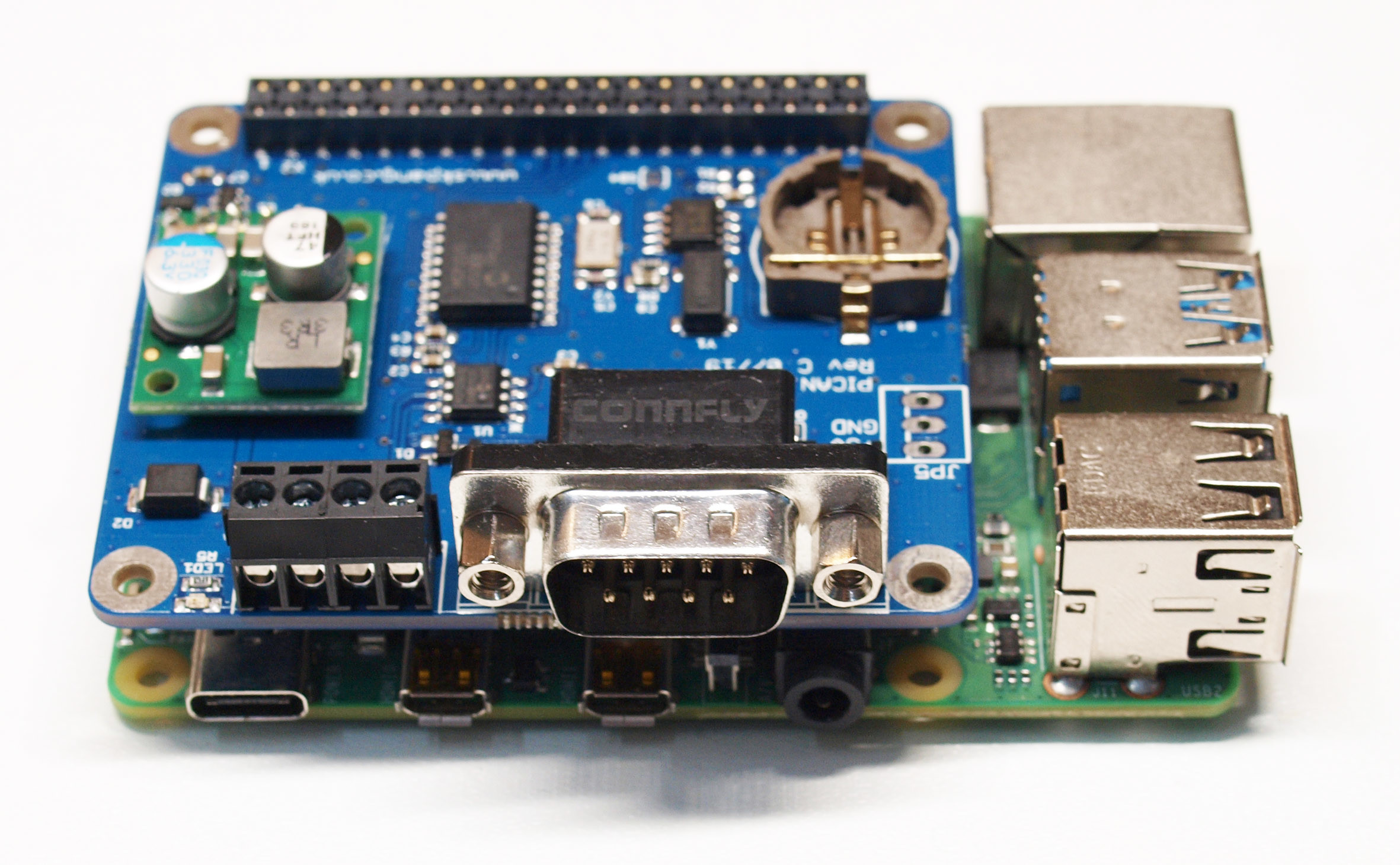
Het board biedt twee connectoren (Figuur 2) om de PiCAN 3 aan te sluiten op een externe CAN-bus. Ten eerste is er een vierpolig aansluitblok met signaalidentificatie op het board afgedrukt. De tweede methode maakt gebruik van een 9-pins D-sub-connector, die veel lezers vanaf een bepaalde leeftijd zullen herkennen als de connector die wordt gebruikt voor standaard RS232-communicatie.
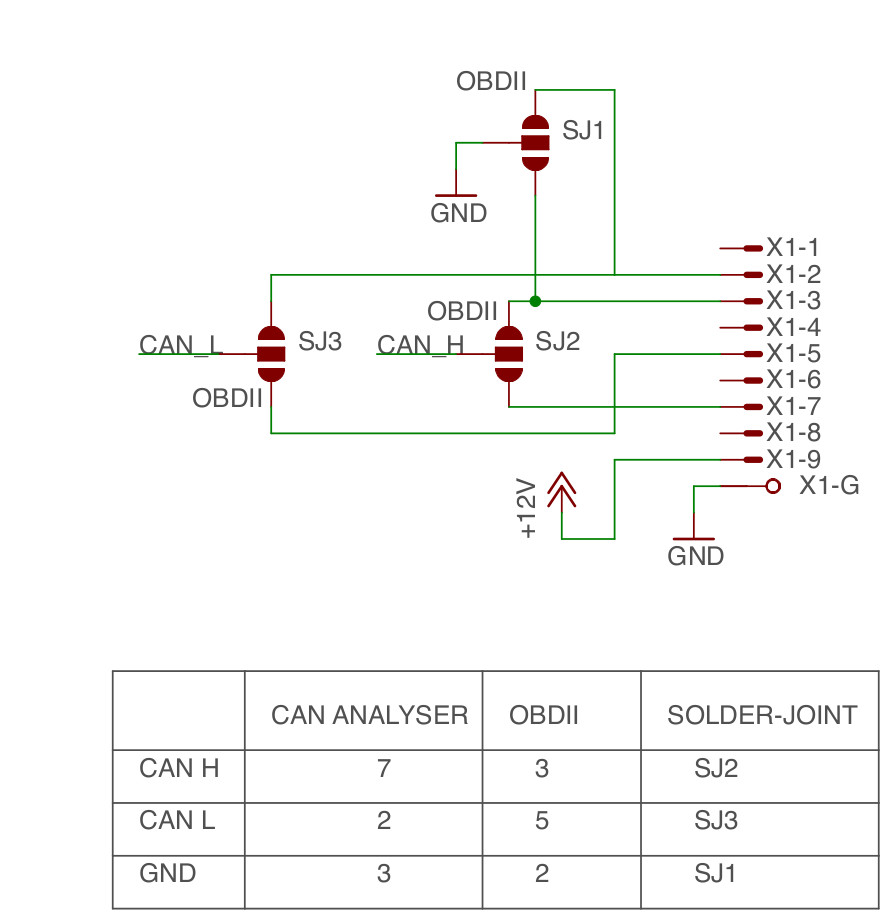
De 9-pins sub-D-connector accepteert een standaard OBD-II naar DB9-kabel om verbinding te maken met een OBD-systeem. Helaas is er geen standaard toewijzing van de connectorpinnen en CAN-signalen. Om te zorgen voor verschillende bedradings mogelijkheden, moeten de pads op het board (Figuur 3) worden overbrugd met soldeer.
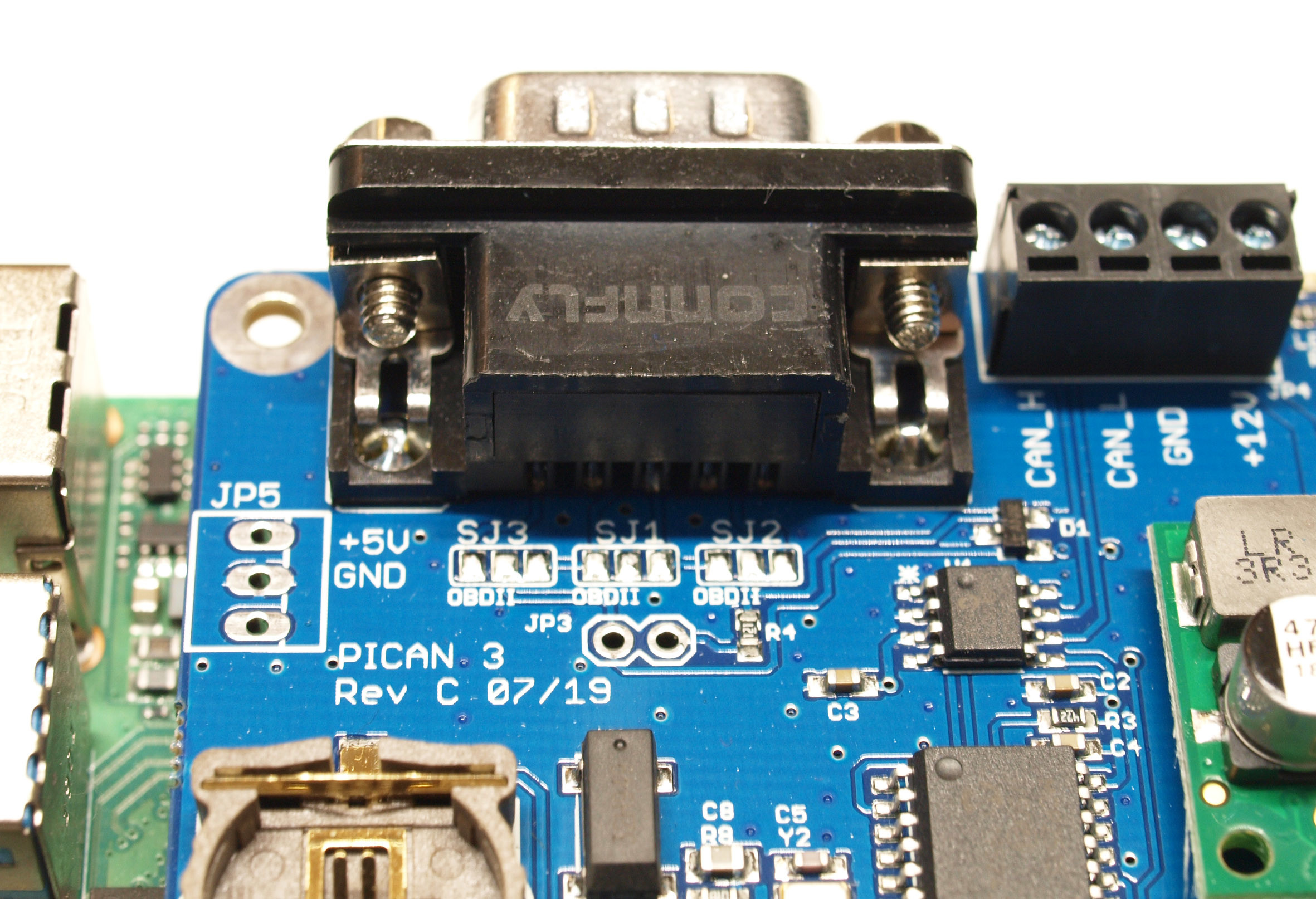
Een toewijzingsplan (Figuur 4) helpt u te beslissen welke pads u wilt koppelen, zodat de connector compatibel is met het systeem waarmee u verbinding maakt. Deze pads zijn bij levering volledig open en zonder de soldeerbruggen worden de signalen niet naar de juiste pinnen geleid.
Automotive toepassingen vereisen vaak nauwkeurige datum en tijd informatie. Hiervoor wordt in de PiCAN 3 een PCF8523 real-time clock chip gebruikt, die communiceert met de Raspberry Pi via een I2C-interface. Aan boord is een houder voor een knoopcelbatterij die plaats biedt aan een CR1220-type knoopcel om de real-time klok van stroom te voorzien.
Het CAN-ecosysteem
Het Linux-besturingssysteem heeft een zekere relevantie in de automobielsector, in feite is er een heel ecosysteem in de Linux-wereld om CAN-bustoepassingen te ondersteunen. De beschikbare hulpprogramma's variëren van kernel drivers tot command line programma's, samen met vele andere handige tools. Om te beginnen met communiceren met de PiCAN 3, moeten we enkele aanpassingen maken aan de /boot/config.txt file van een nieuwe Raspbian-installatie. De SPI-bus moet eerst worden geactiveerd door het volgende blok (let op de extra Overlay-call):
dtparam=spi=on
dtoverlay=mcp2515-can0,oscillator=16000000,interrupt=25
dtoverlay=spi-bcm2835-overlay
De volgende instructies zijn vereist om de realtime klok te gebruiken:
dtparam=i2c_arm=on
dtoverlay=i2c-rtc,pcf8523
De volgende stap is het downloaden van kernel modules en enkele andere hulpprogramma's. Gelukkig is er een kant-en-klaar pakket beschikbaar:
sudo apt-get install can-utils
Na de inzet van de CAN-hulpprogramma's moet de interface worden geregistreerd bij het besturingssysteem. Hiervoor is het voldoende om een nieuwe interface te genereren volgens onderstaand schema. De waarde 500.000 geeft hier de maximale databitrate aan die door de hardware wordt ondersteund:
sudo /sbin/ip link set can0 up type can bitrate 500000
Zodra de interface gereed is, kunt u deze op dezelfde manier gebruiken als vergelijkbare producten van alternatieve fabrikanten kunnen worden gebruikt om te communiceren via de CAN-bus. Een klassieke toepassing is het gebruik van candump. Deze tool kan in de opdrachtregel worden geactiveerd door de volgende opdracht in te voeren:
candump
Eenmaal actief, toont het automatisch en continu alle CAN-informatie die zichtbaar is voor het shield. Dit is met name handig voor reverse-engineering van onbekende motorbesturingen in bestaande systemen.
Er is ook een Python CAN API die kan worden geïnstalleerd:
git clone https://github.com/hardbyte/python-can
cd python-can
sudo python3 setup.py install
De real-time clock toevoegen
Het Linux-besturingssysteem heeft al eeuwenlang realtime klokken op laptops en pc's geïmplementeerd. Systemen die niet zijn uitgerust met een hardware-RTC (vanwege de kosten) maken gebruik van de fake-hwclock emulatormodule in het besturingssysteem om informatie over de tijd te geven; dit is ook het geval met de Raspberry Pi.Om de hardware real-time klok op het CAN-board te kunnen gebruiken, moeten we eerst "nep" hwclock uitschakelen om te voorkomen dat deze de tijd verstoort die wordt geleverd door de "echte" hwclock:
sudo apt-get -y remove fake-hwclock
sudo update-rc.d -f fake-hwclock remove
sudo systemctl disable fake-hwclock
Vervolgens moeten we het bestand /lib/udev/hwclock-set openen (hiervoor heb je normaal gesproken Superuser autorisatie nodig) en de regels code in deze twee blokken uit te schakelen:
#if [ -e /run/systemd/system ] ; then
# exit 0
#fi
#/sbin/hwclock --rtc=$dev --systz --badyear
#/sbin/hwclock --rtc=$dev --systz
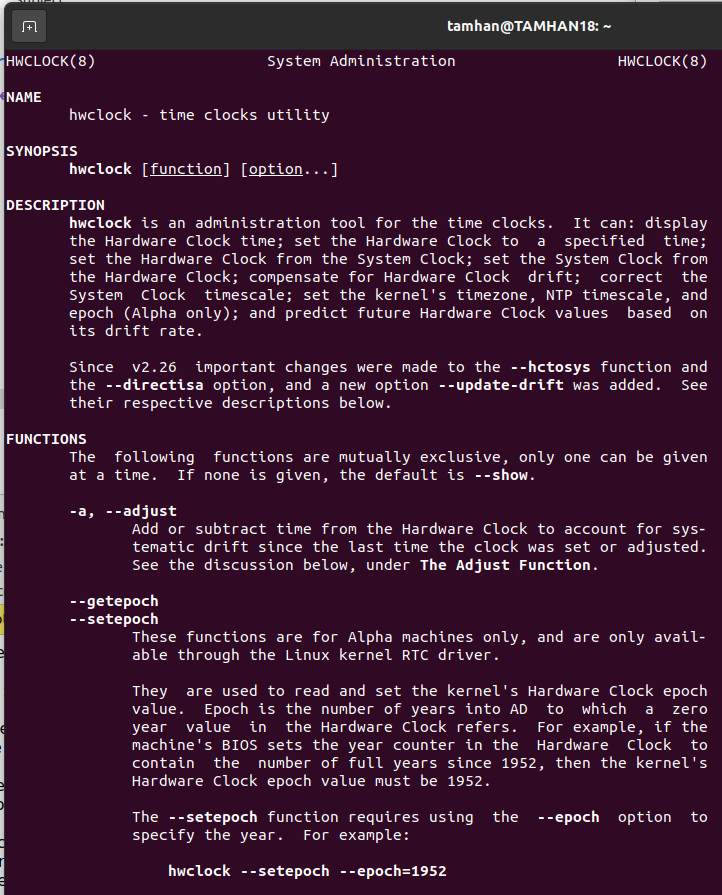
Tijdinformatie van de hardwareklok kan nu worden uitgelezen met hwclock. De kenmerken van deze beheertool voor de hardwareklok worden weergegeven in figuur 5.
CAN-buscommunicatie en -besturing
De PiCAN 3 HAT van SK Pang met zijn on-board 3 A DC/DC converter is nu geschikt voor gebruik met een Raspberry Pi 4 om CAN-bus communicatie- en besturingsmogelijkheden te bieden. Samen met de Raspberry Pi vormt het een compact en relatief goedkoop experimenteel mobiel platform compleet met de nodige interface om direct op een CAN-bus aan te sluiten. De board hardware is open-source, zodat het systeem in uw eigen ontwerpen kan worden geïntegreerd zodra het noodzakelijke evaluatieproces is voltooid.
Vragen of opmerkingen?
Als je technische vragen of opmerkingen hebt over dit artikel, neem dan contact op met de auteur via: tamhan@tamoggemon.com of het Elektor-team bij editor@elektor.com.
Vertaling: Hans Adams
Discussie (0 opmerking(en))