

Zweven op akoestische golven
op
In recente edities van Elektor hebben we drie kleine eenvoudige designs voor magnetische levitatie laten zien. Er werd toen al opgemerkt dat er andere methoden zijn voor het laten zweven van objecten, zoals het gebruik van akoestische golven. Instructables.com beschrijft een doe-het-zelf project, ontworpen aan de Universiteit van Bristol, dat geluidsgolven van kant-en-klare ultrasone transducers gebruikt om deze schijnbare gewichtloosheid van kleine objecten te bereiken. De Makerfabs Acoustic Levitator DIY Kit, verkrijgbaar bij de Elektor Store, bevat alle benodigde onderdelen om dit zogenaamde TinyLev-project te bouwen, inclusief het 3D-geprinte frame dat nodig is om het complete apparaat samen te stellen, wat je de moeite bespaart om zelf naar alle componenten te moeten zoeken.
De kit wordt geleverd zonder documentatie, maar de weblink in de Elektor online winkel leidt ons naar de bovengenoemde Instructables project site. Het zit vol met instructies in tekst, foto's en zelfs video's, die je met een stapsgewijze aanpak door de constructie van de kit zullen leiden.
Op deze webpagina vind je ook (links naar) achtergrondinformatie en theorie over akoestische levitatie. Dit geeft interessant leesvoer in het geval dat je meer wilt doen met de TinyLev dan alleen bouwen en spelen als gadget. Maar in het kort: de levitatie is gebaseerd op het staande golfpatroon van (in dit geval: twee) arrays van ultrasone transducers, elke array gerangschikt in een gebogen bolvormige 'reflector'. Een juiste vorm en geometrie van het frame met de reflectoren en de positionering van de transducers zijn essentieel voor het levitatie-effect. Op de Instructables site zijn er twee 3D-ontwerpen beschikbaar voor het downloaden en printen van het frame voor de TinyLev. De Makerfabs Acoustic Levitator kit bevat een bedrukt exemplaar van versie V1 plus de poot die aan het frame gelijmd moet worden, klaar voor gebruik.
Begin met bouwen, maar first things first
Nadat je de inhoud van de kit hebt gecontroleerd (figuur 1) dien je eerst de juiste polariteit van elke ultrasone transducer bepalen (Stap 4 ... 6).

Polariteitsmarkeringen op ultrasone transducers blijken doorgaans niet te vertrouwen zijn, wat niét betekent dat de MakerFabs-kits twijfelachtige componenten bevat! Met in totaal 72 sounders is het checken hiervan een behoorlijk tijdrovende klus. In de instructies worden twee methoden gepresenteerd hoe dit te doen, waaronder het gebruik van het Arduino Nano board, dat ook in de Makerfabs-kit is opgenomen, als een minimalistische 'oscilloscoop'. Testen met een standaard digitale multimeter is waarschijnlijk de gemakkelijkste en snelste manier om deze klus te doen: markeer eenvoudigweg de polariteit op basis van de initiële potentiaal op de pinnen van de transducer wanneer de sondes zijn aangesloten. Mijn eigen autoranging DMM's bleken hier echter niet voor bruikbaar, je moet namelijk een meter hebben die handmatig kan worden geschakeld naar het meest gevoelige spanningsbereik en dan onmiddellijk reageert wanneer de sondes van de meter op de transducer zijn aangesloten. Uiteindelijk heb ik dus maar de Arduino Nano methode gebruikt. Neem je tijd om dit te doen, één fout kan het levitatie-effect verminderen of zelfs volledig ruïneren. Het is van het grootste belang dat alle transducers de juiste fase van het geluidssignaal hebben.
De transducer arrays
Nu alle transducers correct zijn gemarkeerd is het tijd om ze allemaal op het 3D-geprinte frame te lijmen. De handleiding op Instructables raadt hiervoor het gebruik van hete lijm aan. Voor mij werkt dat niet met relatief kleine onderdelen, zoals met deze transducers. Als er één manier is om van mijn werkbank een puinhoop te maken, geef me dán een heet lijmpistool... Ik gebruikte daarom een tube hobbylijm voor harde kunststoffen. Maar wat je ook gebruikt, zorg ervoor dat alle markeringen die je op deze parts hebt aangebracht in dezelfde richting wijzen: allemaal naar het middelpunt of allemaal naar de buitenrand van de reflector. Ze moeten dan soepel in de ronde uitsparingen/sockets in het frame passen. Ik hield nog wat reserveonderdelen over want vier transducers bleken niet nodig om het frame volledig te vullen (er zitten er namelijk 76 in de kit!). Twee van hen kunnen nog bruikbaar zijn bij het oplossen van problemen danwel kunnen worden gebruikt als sensoren (microfoons) om de fase van het geluid van alle transducers afzonderlijk te controleren (als er iets niet werkt ...).
De volgende stap, Stap 8 in de instructies, is het bedraden van de transducers. De kit bevat een dik stuk gevlochten kabel met de isolatie opengesneden (figuur 2). Elk afzonderlijk koperdraadje hierin kan worden gebruikt om de pootjes van de transducers in concentrische cirkels met elkaar te verbinden.

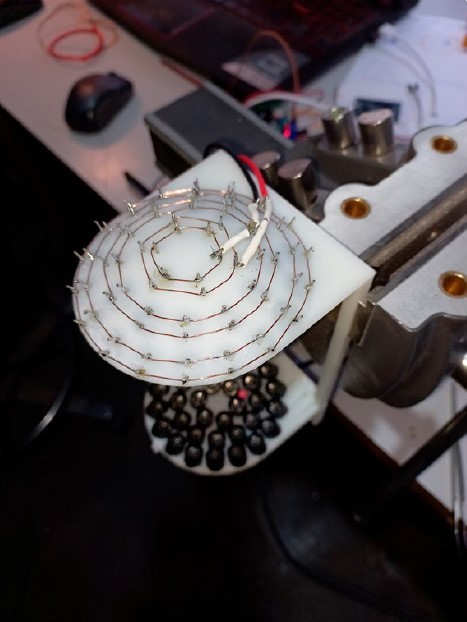
De langere rode en zwarte snoertjes uit de kit maken de bedrading van het frame af, met de transducers dan onderling verbonden in twee arrays van 36. De kortere snoertjes worden apart gehouden voor de voedingsbedrading van alle elektronica als in Stap 15 en 16. Figuur 3 laat zien hoe de bedrading van een van de reflectoren eruit komt te zien.
Andere hardware en software
In de volgende stappen dienen de andere verbindingen te worden gemaakt: tussen de Arduino Nano en het driverboard, de stroombedrading, en tussen het driverboard en het frame met de transducers. De Arduino moet natuurlijk geprogrammeerd worden. Download de Nano_TinyLev.ino schets van de Instructables site, en compileer en upload deze in de Arduino IDE.
De driver is een standaard L298N dual motor driver board, die het 40 kHz geluidssignalen voor de twee transducer arrays levert. De akties om deze verbindingen te maken zullen niet moeilijk zijn voor de ervaren knutselaar. Volg gewoon de tekst en foto's op Instructables die, toegegeven, op sommige punten wat duidelijker hadden kunnen zijn. De basisplaat die wordt gebruikt voor het bevestigen van de PCB's en het stroomcircuit is niet inbegrepen in de kit, maar een stuk multiplex van 10 x 10 cm of groter is voldoende.
Check, check, double-check…
Het wordt aanbevolen om, voordat de transducers worden aangesloten, de tests uit te voeren die in de instructies worden beschreven. Vooral om te controleren op kortsluiting in de arrays, die dan het driver board zouden kunnen beschadigen. Controleer ook de uitgangssignalen van het driver board met een oscilloscoop. Zodra je dan voldoende vertrouwen hebt in je eigen schepsel, dat wil zeggen als je er (zo goed als) zeker van bent dat alle transducers correct zijn aangesloten en werken, kun je tijd besparen door het checken van (de fase van) alle sounders afzonderlijk over te slaan. Dat kan altijd achteraf ook nog: indien de levitatie niet goed werkt, is de kans groot dat de fout in de arrays ligt. Ik had zelf veel vertrouwen in mijn kunsten en dat bleek terecht: het werkte meteen!
En experimenteren maar...
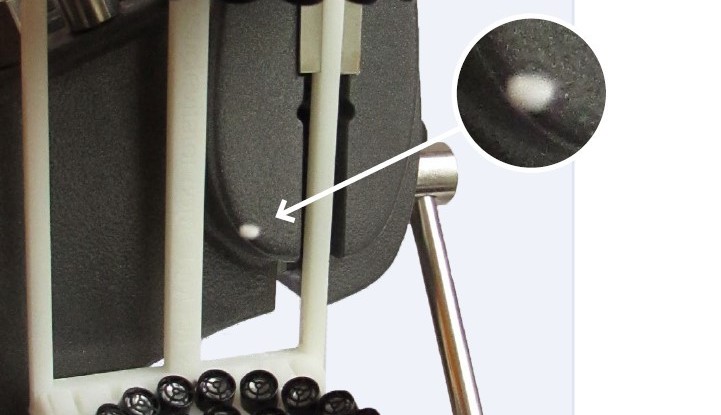
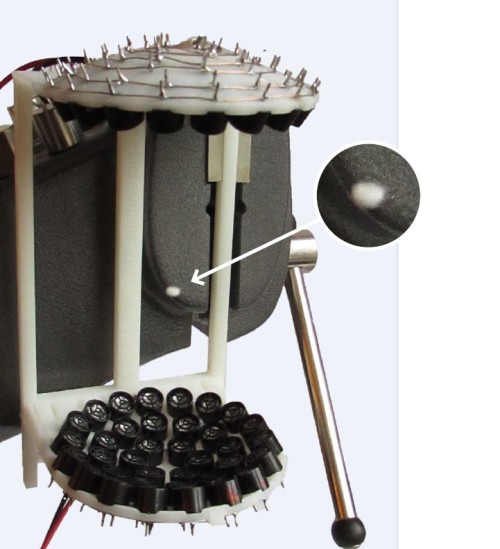
En dan wordt het nu tijd om te gaan experimenteren met allerlei 'dingen' die je met de TinyLev kunt laten zweven. Ik heb hier zelf echter nog niet al te veel mee gedaan. Wel heb ik wat opgerolde kleine stukjes papier, kleine plastic kralen en polystyreenballen getest, en met enige trots liet ik deze eenvoudig zweven tussen de transducer arrays (zie figuur 4). De Instructables pagina beschrijft ook nog het zweven van kleine (dode) insecten en druppels vloeistof. En als je op internet naar 'TinyLev' zoekt, vind je voor dit project veel andere experimenten die misschien leuk zijn om zelf te proberen (of misschien kunnen ze nieuwe ideeën triggeren).
Zweven op akoestische golven
Het bouwen van de TinyLev is dus goed te doen met deze MakerFab Acoustic Levitator DIY Kit. Alle essentiële onderdelen zijn inbegrepen. En met alle informatie die te vinden is op de website van Instructables en andere internetbronnen zal het relatief eenvoudig zijn om te gaan experimenteren met deze akoestische levitatie. Verwacht niet dat de constructie binnen een uurtje is voltooid. Ik ben geruime tijd bezig geweest met het controleren en markeren van de transducers en het solderen van de arrays. En bij de resterende stappen sloeg ik zelfs enkele stappen over die niet strikt noodzakelijk waren om de levitatie aan de praat te krijgen. Overhaast deze zaken echter niet: één fout, vooral in de transducerarrays, kan je veel tijd kosten om achter het probleem te komen en dit op te lossen! Maar als je alles goed hebt gedaan wordt je harde werken beloond met een enorm 'wow'-gevoel zodra je het eerste object op de akoestische golven van de TinyLev ziet zweven!
Vragen of opmerkingen?
Heb je technische vragen of opmerkingen over dit artikel? Neem contact op met de auteur op Luc.Lemmens@elektor.com of neem contact op met het Elektor-team op editor@elektor.com.
Goed om dit te horen!
De frequentie van ultrasound ligt boven de menselijke gehoorgrens, vandaar ook de naam. In dit specifieke project hebben we het over 40 kHz, ongeveer een factor twee hoger dan de hoogste toon die we kunnen waarnemen. In het beste geval zullen wij slechts een klik of kort gekraak horen bij het inschakelen van de TinyLev. Maar andere levende wezens, zoals je huisdieren, kunnen het wél horen en kunnen er sterk op reageren. De katten van de auteur lijken er overigens geen last van te hebben, maar sowieso reageren die alleen op voedselgerelateerde geluiden.
Vertaling: Marc Gauw
Discussie (2 opmerking(en))
klungel 3 jaar geleden
ElektorLabs 2 jaar geleden