
Review: Walabot Creator - een bijzondere 3D-sensor
13 september 2018
op
op
 Walabot is een 3D-sensor die gebruik maakt van hoogfrequente radiogolven om een 3D-“beeld” te schetsen van hetgeen voor hem verschijnt. Hierbij laat hij zich niet (zomaar) tegenhouden door muren of andere obstakels. Maar daar houdt het niet op: de ontwikkelaars hebben hem nog andere functies weten te ontfutselen, zoals een ademhalingsmonitor en een trackingfunctie.
Walabot is een 3D-sensor die gebruik maakt van hoogfrequente radiogolven om een 3D-“beeld” te schetsen van hetgeen voor hem verschijnt. Hierbij laat hij zich niet (zomaar) tegenhouden door muren of andere obstakels. Maar daar houdt het niet op: de ontwikkelaars hebben hem nog andere functies weten te ontfutselen, zoals een ademhalingsmonitor en een trackingfunctie.
Uitpakken en aansluiten
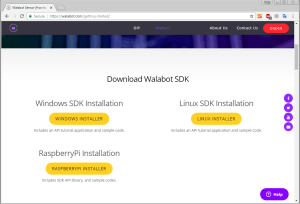 We beginnen bij het begin. Wij hebben de Walabot Creator voor ons liggen. In de verpakking vinden we een beknopt infoblaadje met Get Started-instructies en de Walabot Creator zelf. Een korte blik op het infoblaadje wijst ons naar de website https://walabot.com/gettingstarted, waar een Walabot API-tutorial te vinden is en waar de Software Development Kit (SDK) gratis te downloaden is. De SDK is beschikbaar voor Windows, Linux en Raspberry Pi (als .deb-bestand). Er is weliswaar een Android-app met de naam “Walabot DIY”, maar die werkt helaas alleen met de Walabot DIY en niet met Starter, Creator of Developer.
We beginnen bij het begin. Wij hebben de Walabot Creator voor ons liggen. In de verpakking vinden we een beknopt infoblaadje met Get Started-instructies en de Walabot Creator zelf. Een korte blik op het infoblaadje wijst ons naar de website https://walabot.com/gettingstarted, waar een Walabot API-tutorial te vinden is en waar de Software Development Kit (SDK) gratis te downloaden is. De SDK is beschikbaar voor Windows, Linux en Raspberry Pi (als .deb-bestand). Er is weliswaar een Android-app met de naam “Walabot DIY”, maar die werkt helaas alleen met de Walabot DIY en niet met Starter, Creator of Developer. Wij maakten gebruik van de Windows-versie en installeerden deze op een Windows 7 Professional 64-bit systeem. Tijdens de installatie vraagt Windows of de driver voor de Walabot te vertrouwen is, waarop je natuurlijk bevestigend dient te antwoorden. De eerste poging om de software op een Windows 10-machine te installeren leek eerst goed te gaan, maar helaas werd de Walabot niet gedetecteerd wanneer hij werd aangesloten. Gelukkig is er ook een “Windows 10 SDK beta” en die deed het prima.
Wij maakten gebruik van de Windows-versie en installeerden deze op een Windows 7 Professional 64-bit systeem. Tijdens de installatie vraagt Windows of de driver voor de Walabot te vertrouwen is, waarop je natuurlijk bevestigend dient te antwoorden. De eerste poging om de software op een Windows 10-machine te installeren leek eerst goed te gaan, maar helaas werd de Walabot niet gedetecteerd wanneer hij werd aangesloten. Gelukkig is er ook een “Windows 10 SDK beta” en die deed het prima.Eenmaal geïnstalleerd, is de Walabot-applicatie te starten via de link “WalabotAPItutorial” die het installatieprogramma in het startmenu heeft aangemaakt. Het programma start in eerste instantie de tutorial voor het aansluiten van de hardware, waarin vier stappen doorlopen worden. Daarna kun je met de tabs bovenaan in het scherm wisselen tussen de verschillende opties die de SDK biedt.

Hoe ziet het er uit?
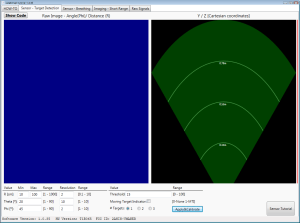 Het tweede tabblad van het programma — Sensor – Target Detection — is eigenlijk het meest interessante deel, want hier stel je de verschillende parameters in en krijg je visuele feedback van wat de sensor ‘ziet’. Qua instellingen kunnen we de volgende parameters aanpassen:
Het tweede tabblad van het programma — Sensor – Target Detection — is eigenlijk het meest interessante deel, want hier stel je de verschillende parameters in en krijg je visuele feedback van wat de sensor ‘ziet’. Qua instellingen kunnen we de volgende parameters aanpassen:- R stelt het sensorbereik in tussen 1 en 1000 cm*
- Theta stelt de horizontale hoek van het sensorbereik in van 0 tot 90 graden**
- Phi stelt de verticale hoek van het sensorbereik in van 1 tot 90 graden**
- In de kolom Resolution stel je het oplossend vermogen in van elk van de drie voorgaande parameters
- Met de Threshold-instelling filter je zwakke signalen
- Wanneer je de Moving Target Indicator aanvinkt, zal de software alleen bewegende objecten aangeven; objecten die eerst bewogen en daarna stilstaan, zullen langzaam weggefilterd worden
- Met het aantal targets geef je aan hoeveel bewegende objecten de software kan verwachten en maximaal mag weergeven in de detectievelden
**Walabot ‘rechtop’ met de USB-aansluiting naar beneden wijzend.
Verder vinden we twee knoppen: ‘Apply & Calibrate’ en ‘Sensor Tutorial’, die eigenlijk wel voor zichzelf spreken. Om een wijziging van de parameters door te voeren, klik je op de Apply & Calibrate-knop. Hiermee wordt ook meteen de sensor gekalibreerd. Bij het kalibreren is het overigens belangrijk dat er zich geen bewegende objecten voor de sensor begeven. Dit zou het kalibratieproces verstoren en leiden tot onjuiste metingen.
Arena
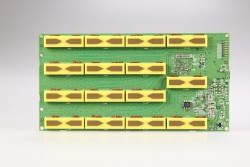
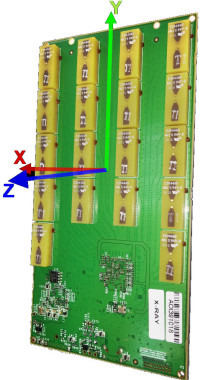 De twee grote vensters geven visueel weer wat de antennes van de Walabot oppikken. Het gebied dat de sensor scant, wordt de ‘Arena’ genoemd. De twee vensters zijn dan ook een visuele interpretatie van deze arena. Beiden tonen het y- en z-meetgebied, hierin is de sensor het meest gevoelig. De meest zinvolle opstelling van de sensor is dan ook ‘horizontaal’, met de USB-aansluiting aan de rechterkant als je tegen de antenne-array van de Walabot aankijkt. Dan komt een beweging van een gedetecteerd object naar links overeen met wat je op het scherm ziet gebeuren.
De twee grote vensters geven visueel weer wat de antennes van de Walabot oppikken. Het gebied dat de sensor scant, wordt de ‘Arena’ genoemd. De twee vensters zijn dan ook een visuele interpretatie van deze arena. Beiden tonen het y- en z-meetgebied, hierin is de sensor het meest gevoelig. De meest zinvolle opstelling van de sensor is dan ook ‘horizontaal’, met de USB-aansluiting aan de rechterkant als je tegen de antenne-array van de Walabot aankijkt. Dan komt een beweging van een gedetecteerd object naar links overeen met wat je op het scherm ziet gebeuren.Het venster links toont de intensiteit van de gemeten signalen (reflecties), lichtblauw voor de laagste intensiteit, rood voor de hoogste intensiteit. De positie in het scherm komt zoals gezegd overeen met de positie van het object in de Arena.
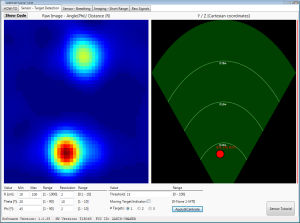 Het venster aan de rechterzijde toont een cartesische weergave van het yz-vlak (xz-vlak als de sensor horizontaal wordt gepositioneerd, zoals we hierboven suggereerden). De ingestelde openingshoek (phi) beperkt het ‘zicht’ van de sensor en geeft de ‘Arena’ de vorm van een omgedraaide kegel. Overigens is niet elke combinatie van openingshoeken phi en theta mogelijk. De software geeft dan een foutmelding. In deze ‘grafiek’ geeft de software (tot maximaal drie) objecten die de sensor detecteert weer met een rode stip vergezeld door numerieke data. Zeg maar een gefilterde versie van het linker scherm, aangevuld met exacte cijfers.
Het venster aan de rechterzijde toont een cartesische weergave van het yz-vlak (xz-vlak als de sensor horizontaal wordt gepositioneerd, zoals we hierboven suggereerden). De ingestelde openingshoek (phi) beperkt het ‘zicht’ van de sensor en geeft de ‘Arena’ de vorm van een omgedraaide kegel. Overigens is niet elke combinatie van openingshoeken phi en theta mogelijk. De software geeft dan een foutmelding. In deze ‘grafiek’ geeft de software (tot maximaal drie) objecten die de sensor detecteert weer met een rode stip vergezeld door numerieke data. Zeg maar een gefilterde versie van het linker scherm, aangevuld met exacte cijfers.

Read full article
Hide full article
Discussie (0 opmerking(en))